Τομείς: Τομέας Ηλεκτρολογίας και Τομέας Πληροφορικής
Συμμετέχοντες μαθητές: Διονυσόπουλος Χρήστος, Καρράς Ιωάννης, Κωνσταντάκος Δημήτριος, Λαμπρόπουλος Γεώργιος
Γεωργούλη Κωνσταντίνα, Γιαννοπούλου Νικολέττα, Καριώρη Δήμητρα, Τριαντοπούλου Ελπίδα
Επιβλέποντες καθηγητές: Αδαμόπουλος Νίκος και Πανόπουλος Θανάσης.
Περιγραφή του έργου
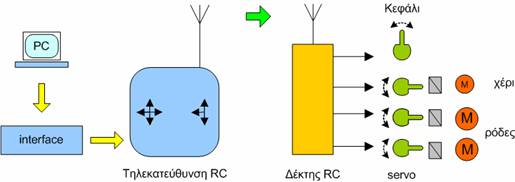
Το Τηλερομπότ είναι ένας αυτοκινούμενος μηχανισμός, ελεγχόμενος ασύρματα είτε από Η/Υ είτε από χειριστήριο. Μπορεί να κινείται εμπρός – πίσω, να στρίβει αριστερά – δεξιά, να κάνει επιτόπου αναστροφή, να κινεί το χέρι πάνω – κάτω, να κινεί το κεφάλι αριστερά – δεξιά, να κάνει λήψη εικόνας και ήχου από το χώρο που κινείται και να τα μεταδίδει ασύρματα στο χειριστή του, αλλά και να εκφωνεί ηχητικά μηνύματα και εντολές. Είναι μια εποπτική κατασκευή που δείχνει τις αρχές ελέγχου ηλεκτρομηχανισμών ασύρματα και μέσω λογισμικού από Η/Υ.
Το έργο δημιουργήθηκε κατά τη διάρκεια του σχολικού έτους 2006-2007 από ομάδες μαθητών του τομέων Ηλεκτρολογίας και Πληροφορικής του 1ου ΕΠΑΛ/ΤΕΕ Πύργου με τη βοήθεια και την επίβλεψη των καθηγητών τους Θανάση Πανόπουλου και Νίκου Αδαμόπουλου αντίστοιχα. Η ομάδα του τομέα Ηλεκτρολογίας δημιούργησε την κατασκευή, ενώ η ομάδα του τομέα Πληροφορικής το λογισμικό ελέγχου.
Η χρηματοδότηση του έργου έγινε κατά το μεγαλύτερο μέρος από το πρόγραμμα Δαίδαλος, στα πλαίσια της πράξης Ανάπτυξη και Εφαρμογή Προγραμμάτων Επίδειξης και Βράβευσης Εκπαιδευτικών Έργων Μαθητών των Δημοσίων ΤΕΕ και ΣΕΚ του Γ’ ΚΠΣ με συγχρηματοδότηση κατά 75% από το Ευρωπαϊκό Κοινωνικό Ταμείο και κατά 25% από εθνικούς πόρους.
Με τη δημιουργία του έργου δόθηκε η ευκαιρία στους μαθητές να αναπτύξουν τη δημιουργικότητά τους, το ομαδικό πνεύμα εργασίας, τις ικανότητες έρευνας, συλλογής, αξιολόγησης και ορθής χρήσης της πληροφορίας. Επίσης, να έρθουν σε επαφή με πρακτικές εφαρμογές των γνώσεων που αποκτούν, να γνωρίσουν μεθόδους έρευνας και αναζήτησης τρόπων επίλυσης προβλημάτων, να αποκτήσουν εμπειρίες από την οργάνωση και διαχείριση ενός σχεδίου εργασίας (project), να αναλάβουν πρωτοβουλίες, να καλλιεργήσουν τις κλίσεις και τα ταλέντα τους, κ.ά.
Παρουσίαση έργου σε Video
Τα Ηλεκτρομηχανικά Μέρη
Για την κίνηση του Τηλερομπότ στο χώρο χρησιμοποιούνται 2 ηλεκτρικά μοτέρ από υαλοκαθαριστήρες αυτοκινήτου, τα οποία είναι προσαρμοσμένα ανεξάρτητα στις 2 ρόδες που το κινούν. Έτσι, επιτυγχάνεται πλήρης ελευθερία κινήσεων. Η κίνηση του χεριού επιτυγχάνεται μέσω ενός ξεχωριστού μοτέρ. Η κίνηση του κεφαλιού γίνεται μέσω ενός σερβομοτέρ στο οποίο στηρίζεται. Στο κεφάλι υπάρχει μικρή ασύρματη κάμερα η οποία μεταδίδει εικόνα και ήχο από το χώρο στην οθόνη του χειριστή. Στο σώμα του Τηλερομπότ έχει ενσωματωθεί ένα ζεύγος κοινών αυτοενισχυόμενων ηχείων από Η/Υ. Έτσι, είναι δυνατή η εκφώνηση προηχογραφημένων ηχητικών μηνυμάτων μέσω του λογισμικού του Η/Υ, είτε ζωντανά από το χειριστή. Η μετάδοση του ήχου γίνεται μέσω ενός ζεύγους Walkie Talkie, στο ένα άκρο του οποίου συνδέεται η κάρτα ήχου του Η/Υ, ενώ στο άλλο τα ηχεία του Τηλερομπότ μέσω κατάλληλης προσαρμογής.
Για τον ασύρματο έλεγχο των κινήσεων του Τηλερομπότ ενσωματώθηκε σύστημα τηλεκατεύθυνσης που χρησιμοποιείται στον αερομοντελισμό. Ο δέκτης και τα σερβομοτέρ που τον συνοδεύουν προσαρμόστηκαν στο Τηλερομπότ και καθοδηγούν τα μοτέρ για τις 2 ρόδες, το μοτέρ του χεριού και το σερβομοτέρ του κεφαλιού. Ο έλεγχος τον κινήσεων γίνεται είτε χειροκίνητα μέσω των χειριστηρίων του πομπού, είτε μέσω του λογισμικού του Η/Υ.
Interface: Ηλεκτρονικό κύκλωμα, που συνδέει την παράλληλη θύρα του Η/Υ με τον πομπό της τηλεκατεύθυνσης. Από τις 8 ψηφιακές εξόδους της θύρας (ακροδέκτες 2 έως 9) παρέχεται τάση περίπου 3,5 ή 0 Volt, για το λογικό 1 ή 0 αντίστοιχα. Όπως φαίνεται στο παρακάτω διάγραμμα, η τάση αυτή ενεργοποιεί τα τρανζίστορ Τ1 που άγουν και τροφοδοτούν τα ρελέ C με 12 V. Αυτά συνδέουν μεταβλητές αντιστάσεις στα χειριστήρια της τηλεκατεύθυνσης.
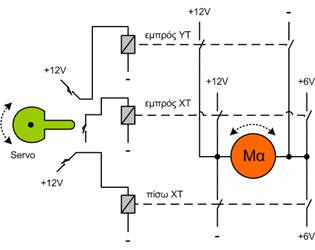
Έλεγχος κινήσεων: Όπως φαίνεται και στο ηλεκτρικό κύκλωμα κίνησης, το μοτέρ της κάθε ρόδας (από υαλοκαθαριστήρα αυτοκινήτου) τροφοδοτείται με 6 ή 12V για χαμηλή και υψηλή ταχύτητα αντίστοιχα. Αντιστρέφοντας την πολικότητα έχουμε οπισθοπορεία. Για στροφή αριστερά η δεξιά ρόδα γυρνά ταχύτερα από την αριστερή. Για αναστροφή, π.χ. δεξιά επιτόπου, η δεξιά ρόδα γυρνά όπισθεν και η αριστερή μπροστά.
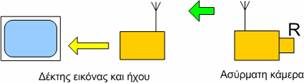
Λήψη εικόνας και ήχου: Γίνεται από ασύρματη κάμερα που μεταδίδει στην οθόνη του δέκτη.
Mετάδοση ήχου: Η ομιλία του χειριστή (ή ηχογραφημένα ηχητικά μηνύματα από το PC) μεταδίδεται με τον πομπό Walkie Talkie του χειριστή στο δέκτη Walkie Talkie του Τηλερομπότ. Το σήμα (από το μεγαφωνάκι του δέκτη) ενισχύεται στα δυναμικά μεγάφωνα.

Λογισμικό ελέγχου των κινήσεων
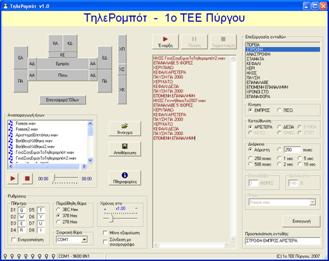
Για τον έλεγχο του Τηλερομπότ μέσω Η/Υ αναπτύχθηκε από την ομάδα του έργου πρωτότυπο λογισμικό χρησιμοποιώντας το προγραμματιστικό περιβάλλον της Visual Basic.
Μέσω του λογισμικού είναι δυνατός ο έλεγχος όλων των δυνατών κινήσεων, ενώ ταυτόχρονα αυτές απεικονίζονται με γραφικό τρόπο μέσα στο παράθυρο της εφαρμογής.
Ο έλεγχος μπορεί να γίνεται χειροκίνητα, κάνοντας κλικ στα απεικονιζόμενα μέρη του χεριού ή πατώντας πλήκτρα, αλλά και αυτόματα, συντάσσοντας και ενεργοποιώντας προγράμματα ελέγχου.
Δημιουργία προγραμμάτων ελέγχου
Τα προγράμματα ελέγχου περιέχουν κατάλληλες εντολές και παραμέτρους (βλ. παρακάτω πίνακα) που έχουν σχεδιαστεί ώστε να είναι δυνατός ο εύκολος χρονοπρογραμματισμός όλων των δυνατών κινήσεων του Τηλερομπότ και η εκφώνηση ηχητικών μηνυμάτων.
Μέσα στο λογισμικό δημιουργήθηκε κατάλληλο εργαλείο διαμόρφωσης και επεξεργασίας αυτών των εντολών ώστε να μην απαιτείται από το χρήστη η απομνημόνευση της ακριβούς σύνταξής τους αλλά ούτε καν η πληκτρολόγησή τους.
Ακολουθεί ένα μικρό παράδειγμα από τέτοιο πρόγραμμα ελέγχου:
| Παράδειγμα Προγράμματος Ελέγχου |
|---|
| ΕΠΑΝΑΛΑΒΕ 3 ΦΟΡΕΣ ΧΕΡΙ ΠΑΝΩ ΠΟΡΕΙΑ ΕΜΠΡΟΣ ΓΙΑ 10000 ΠΑΥΣΗ ΓΙΑ 10000 ΚΕΦΑΛΙ ΔΕΞΙΑ ΣΤΡΟΦΗ ΕΜΠΡΟΣ ΔΕΞΙΑ ΓΙΑ 3000 ΠΑΥΣΗ ΓΙΑ 3000 ΚΕΦΑΛΙ ΑΡΙΣΤΕΡΑ ΣΤΡΟΦΗ ΠΙΣΩ ΑΡΙΣΤΕΡΑ ΓΙΑ 3000 ΠΑΥΣΗ ΓΙΑ 3000 ΧΕΡΙ ΣΤΟΠ ΚΕΦΑΛΙ ΕΥΘΕΙΑ ΗΧΟΣ Κάντε_Άκρη.wav ΑΝΑΣΤΡΟΦΗ ΔΕΞΙΑ ΓΙΑ 4000 ΠΑΥΣΗ ΓΙΑ 4000 ΕΠΟΜΕΝΗ ΕΠΑΝΑΛΗΨΗ ΗΧΟΣ Αποστολή_Εξετελέσθη.wav ΕΠΑΝΑΦΟΡΑ |
Με την έναρξη της εκτέλεσης του παραπάνω προγράμματος το τηλερομπότ ξεκινάει περιστροφή του χεριού προς τα πάνω με ταυτόχρονη πορεία προς τα εμπρός. Μετά από 10 sec στρίβει το κεφάλι προς τα δεξιά με ταυτόχρονη στροφή εμπρός-δεξιά. Μετά από 3 sec στρίβει το κεφάλι προς τα αριστερά με ταυτόχρονη στροφή πίσω-αριστερά. Μετά από 3 sec σταματάει την στροφή και ταυτόχρονα σταματάει την περιστροφή του χεριού, επαναφέρει το κεφάλι προς τα εμπρός, ξεκινάει την εκφώνηση του ηχητικού μηνύματος Κάντε_Άκρη.wav και ξεκινάει επιτόπου στροφή προς τα δεξιά. Μετά από 4 sec σταματάει και επαναλαμβάνει όλες τις εντολές από την αρχή. Αφού εκτελεστούν όλα τα παραπάνω 3 φορές, το τηλερομπότ σταματάει αναφέροντας ταυτόχρονα ότι Αποστολή_Εξετελέσθη.wav.
Ακολουθούν οι εντολές και οι παράμετροί τους που μπορούν να χρησιμοποιηθούν στα πλαίσια ενός προγράμματος ελέγχου:
| Εντολές προγράμματος ελέγχου του Τηλερομπότ | |
|---|---|
| Εντολές | Περιγραφή λειτουργίας |
| ΠΟΡΕΙΑ | Παράμετροι: ΕΜΠΡΟΣ, ΠΙΣΩ. Έναρξη κίνησης του Τηλερομπότ προς την αντίστοιχη πορεία. |
| ΣΤΡΟΦΗ | Παράμετροι: ΕΜΠΡΟΣ, ΠΙΣΩ, και: ΑΡΙΣΤΕΡΑ, ΔΕΞΙΑ. Έναρξη στροφής προς την αντίστοιχη πορεία και κατεύθυνση. |
| ΑΝΑΣΤΡΟΦΗ | Παράμετροι: ΑΡΙΣΤΕΡΑ, ΔΕΞΙΑ. Έναρξη επιτόπου στροφής του Τηλερομπότ. |
| ΣΤΑΜΑΤΑ | Σταματάει οποιονδήποτε από τους παραπάνω ελιγμούς βρίσκεται σε εξέλιξη.Εναλλακτικά, μπορεί να προστεθεί στις παραπάνω εντολές η παράμετρος ΓΙΑ ##### για αυτόματη διακοπή του ελιγμού μετά από ##### msec. |
| ΚΕΦΑΛΙ | Παράμετροι: ΑΡΙΣΤΕΡΑ, ΔΕΞΙΑ, ΕΥΘΕΙΑ. Στροφή του κεφαλιού προς την αντίστοιχη κατεύθυνση. |
| ΧΕΡΙ | Παράμετροι: ΠΑΝΩ, ΚΑΤΩ, ΣΤΟΠ. Περιστροφή του χεριού ή ακινητοποίησή του. |
| ΗΧΟΣ ####### | Αυτόματη εκφώνηση από το Τηλερομπότ του προηχογραφημένου αρχείου ήχου ####### (μπορεί να είναι τύπου wav, mp3 ή wma). |
| ΠΑΥΣΗ | Προσωρινή διακοπή της εκτέλεσης των εντολών. Η συνέχιση της εκτέλεσης γίνεται κάνοντας κλικ με το ποντίκι στο σχετικό κουμπί του παραθύρου.Εναλλακτικά, μπορει να χρησιμοποιηθεί η παράμετρος ΓΙΑ ##### για χρονική καθυστέρηση κατά ##### msec πριν την εκτέλεση της επόμενης εντολής. |
| ΕΠΑΝΑΛΑΒΕ ## ΦΟΡΕΣ(εντολές)ΕΠΟΜΕΝΗ ΕΠΑΝΑΛΗΨΗ | Επαναληπτική εκτέλεση των ενδιάμεσων εντολών ## φορές. Πρόκειται για απλή επαναληπτική δομή αφού, στην αρχική φάση, δεν κρίθηκε αναγκαία η δυνατότητα εμφωλευμένων επαναλήψεων. |
| ΧΡΟΝΟΙ ΣΤΟ ### | Επιτάχυνση ή επιβράδυνση της εκτέλεσης των εντολών. Μεταβολή της διάρκειας κατά ### %. |
| ΕΠΑΝΑΦΟΡΑ | Σταματάει οποιαδήποτε μετακίνηση του Τηλερομπότ, ακινητοποιεί το χέρι και στρέφει το κεφάλι προς τα εμπρός. |
Μέσα στο λογισμικό δημιουργήθηκε κατάλληλο εργαλείο διαμόρφωσης και επεξεργασίας των εντολών του προγράμματος ελέγχου ώστε να μην απαιτείται από το χρήστη η απομνημόνευση της ακριβούς σύνταξής τους αλλά ούτε καν η πληκτρολόγησή τους.
Συμμετοχή σε διαγωνισμούς και εκδηλώσεις
Για τη συμμετοχή του έργου σε διάφορους διαγωνισμούς δημιουργήθηκαν από τους μαθητές παρουσιάσεις με το MS PowerPoint, σχεδιάστηκαν γραφικές αναπαραστάσεων των κατασκευών και σχηματικά διαγράμματα των ηλεκτρονικών κυκλωμάτων με το MS Visio, έγινε ψηφιακή επεξεργασία φωτογραφιών και επεξεργασία βίντεο.
Για την προβολή και διάχυση των αποτελεσμάτων δημιουργήθηκαν DVD, αφίσες, καθώς και ιστοσελίδες στο δικτυακό τόπο του σχολείου.
Το σχολείο με αυτό το έργο έλαβε μέρος στο διαγωνισμό Επιστημονικές & Τεχνολογικές Εργασίες για μαθητές σχολείων της περιφέρειας Δυτικής Ελλάδας, που διοργανώθηκε τον Απρίλιο 2007 από το Ερευνητικό Ινστιτούτο Χημικής Μηχανικής και Χημικών Διεργασιών Υψηλής Θερμοκρασίας (ΕΙΧΗΜΥΘ) του Ιδρύματος Τεχνολογίας και Έρευνας (ΙΤΕ), λαμβάνοντας το 1ο βραβείο. Ακόμα, συμμετείχε στην Περιφερειακή Έκθεση Δυτικής Ελλάδας του προγράμματος Δαίδαλος, στην Πάτρα το Μάιο 2007.
Η εμπειρία και τα αποτελέσματα από τη δημιουργία του έργου παρουσιάσθηκαν στη Διημερίδα Ενημέρωση και Ευαισθητοποίηση Εκπαιδευτικών Τ.Ε.Ε. Ν. Ηλείας για τις Πράξεις του Επιχειρησιακού Σχεδίου Δράσης της Ε.Ε. (Πύργος, 7-8 Φεβρουαρίου 2008), στο 4ο Συνέδριο Διδακτική της Πληροφορικής (Πάτρα, 28-30 Μαρτίου 2008) και στη 2η Πανελλήνια Διημερίδα Καθηγητών Πληροφορικής Δευτεροβάθμιας Εκπαίδευσης Η Πληροφορική στην Εκπαίδευση – Το σχολείο της διαθεματικότητας και της ευρυζωνικότητας (Ρόδος, 11-12 Απριλίου 2008).
Επίλογος
Το έργο αποτέλεσε μια ευκαιρία «ανοίγματος» του σχολείου προς την τοπική κοινωνία, με άρθρα στον τοπικό και αθηναϊκό τύπο, παρουσιάσεις από τους τοπικούς τηλεοπτικούς σταθμούς, αλλά και διάχυση των αποτελεσμάτων στην εκπαιδευτική και ακαδημαϊκή κοινότητα της χώρας.
Ελπίζουμε η δημιουργία του έργου να παρακινήσει κι άλλους μαθητές και συναδέλφους εκπαιδευτικούς στην συμμετοχή τους σε ανάλογες διαδικασίες. Από την πλευρά της πολιτείας και των επιστημονικών φορέων, είναι αναγκαία η ανάληψη δράσεων οι οποίες θα στηρίζουν και θα ενθαρρύνουν τέτοιες προσπάθειες.
